"Nature has worked in our favor"

© 2014 EPFL
Biorobotics’ aim is to design more efficient robots based on locomotion solutions developed by the animal world. In such a way, it provides new research tools for biologists. Prof. Auke Ijspeert, specialist in the field, shares his thoughts on the evolution of this expanding field.
Whether flyers, swimmers, walkers or crawlers, animal species have developed a wide range of solutions to move efficiently in their environment. For biorobotics specialists, these models constitute a source of inspiration for designing robots able to evolve on all sorts of terrains. Auke Ijspeert, professor at EPFL’s Biorobotics laboratory, has just published an article in Science magazine in which he reviews this growing field.
- Why has biorobotics developed so strongly during recent years?
"Firstly, because technology itself has improved dramatically. 3D printing techniques allow for a quick construction of complex parts, embedded computing capacity is increasing every year; batteries have become more compact and easy to use. This trend also responds to developments in the field of biology that provide new ways to study in detail the characteristics of animal motion, such as X-ray films to observe the movements of bones in real time or force sensors to measure the different forces of interaction with the ground.
- In addition to making toys, what’s its use?
Biorobotics is much more than that. It is inspired by the animal world to go further than traditional wheeled-, propeller- or caterpillar- based robots, and find new ways to move such machines. Clearly, nature has worked in our favor. An animal cannot survive long if it doesn’t move in a suitable way. Evolution has developed a range of locomotion modes extremely well suited to grounds that sometimes can be very difficult to get through. Making robots capable of moving in unstructured environments - bumps, rocks, mud, gravel, sand or water - is a real challenge. The animal world offers us a think tank to find solutions.
- If robotics makes the most of biology, is the opposite also true?
Biologists are increasingly using robots as scientific tools. By including real physics to researchers - as opposed as simulated physics of numerical simulations - these biorobots offer a clear advantage for testing certain hypotheses. For example, the study of a swimming fish requires the consideration of a large number of criteria: morphology of the animal, movement, speed and direction, force exerted by each muscle, but also interaction with the environment, resistance of the water, etc. These are all very complex problems that add up and influence each other. Robots allow scientists to observe such data live, and thus ensure the inclusion of all elements that come into play. And there is another important advantage: we can carry out operations with a robot that are impossible with a real animal, such as equipping it with multiple sensors for calculating its internal forces, repeating experiments as often as necessary or changing their morphology. Doubling the length of a leg, for example, will help us understand the influence of a particular bone on the efficiency of locomotion. Which of course cannot be done on a living being...

Salamander robot. Credit: BIOROB
- What is the future of this field? Where is it going to, in your opinion?
The contribution of biorobotics to biology is a rapidly evolving field, and there are many possible studies to come. Biorobots will also have increasingly varied applications, whether in environmental monitoring, agriculture, search-and-rescue to victims of disasters, or exploration of high risk areas too dangerous for humans or dogs. By the way, this is one of the fields of robotics that we tackle in Switzerland within the NCCR in Robotics.
- Walking, swimming, flying, crawling, which is the most interesting?
Each is interesting. Take swimming, for example. Observing the efficiency of fish in their environment allows finding alternatives to propeller-based swimming. Thus, we can create more powerful and autonomous robots and even improve the principles of navigation and ship design. Legged robots are particularly suitable in the presence of a non-structured soil, as they make discrete contacts with the ground, unlike wheeled robots requiring continuous contact. As for flying, fixed-wing - like planes - or rotating-wing - like helicopters - models remain the most effective and simple to build for bigger robots. A flapping-wing system is more adequate in the case of smaller ones. Fluid dynamics determines that, for an insect, to move in the air is the same as if we were moving in oil. In this case, a propeller is less effective than an oscillatory motion like insects and birds.
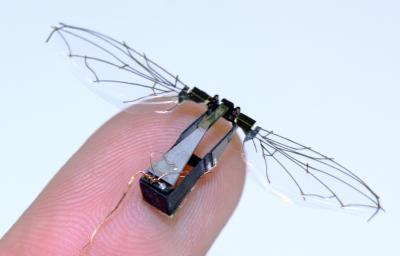
Credit: Harvard Microrobotics Lab
- What about our human way of walking?
The humanoid model is well suited for moving among humans, where it must climb stairs, use tools, etc. If it were to move outside, other means such as quadruped walking would be better. It is interesting to note that, in the case of humans, biorobotics has also served biology by demonstrating that mechanics, and not just the brain, solves some of the control problems. Experiments have shown that some humanoid robots, called passive walkers, managed to go down a slope without a motor, nor batteries and without falling. Similarly to the human morphology, they produce a pendulum effect that provides the necessary energy and stability. So we can see that there is a kind body intelligence, which, if we understand it, would allow us to invent a more effective and fluid locomotion that would require less energy.
- What are the biggest challenges for a biorobotics specialist?
Firstly, designing such robots requires big teams and a range of expertise in mechanical engineering, computer science, electronics and mathematics. Next, understand the movement of a living being is difficult, because locomotion is the result of the interaction of many components, some of which are very difficult to reproduce. For instance, replicating the viscoelastic properties of an arm is very complicated at the mechanical level. And all the technologies that would allow us to achieve this have not yet been accomplished, particularly in terms of skin substitutes or actuators, which are still struggling to replicate muscles faithfully. These, however, are elements that play an important role in locomotion.
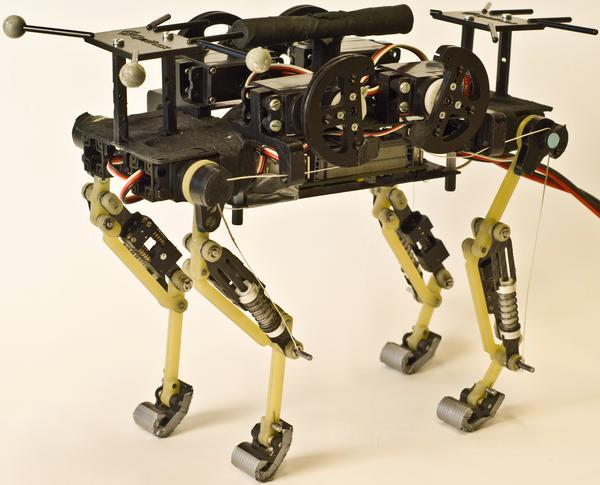
Cheetah cub robot. Credit: BIOROB
- Is a movement that seems trite and simple to us actually a complex operation?
The more I work in robotics, the more I realize how every living creature is constantly solving extremely complicated control problems. As they are done intuitively, we tend to underestimate the meaning of these gestures. To try to incorporate into a robot all identified components is an interesting exercise. We often realize that what we had thought to have understood on paper does not work in practice. We usually lack certain data or understanding of certain mechanisms. They are usually subtle interactions that have not been decrypted yet, but which are essential for interacting with the environment."